2026年NOI大纲对算法部分进行了系统性的知识分层,从基础算法思想到高级算法优化均有明确要求。为帮助广大竞赛选手精准把握大纲要点,自主选拔在线特整理NOI大纲中关于算法的解读,一起来看。
福利资料:为协助信息学竞赛生高效备考,特整理《2014-2025年信息学竞赛试题及答案》pdf资料
2026年NOI大纲解读十三:算法
一、 知识点概览:
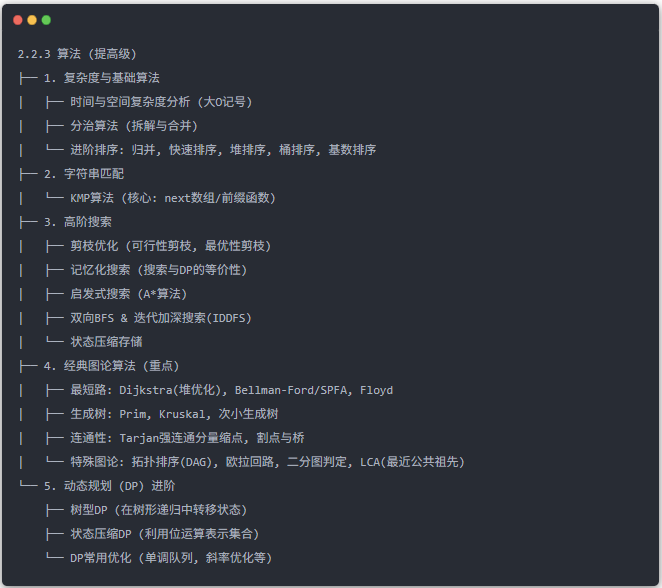
根据《全国青少年信息学奥林匹克系列竞赛大纲(2025年修订版)》,2.2.3 算法是提高级(CSP-S)试卷中占比最大、思维难度最高的部分。大纲对提高级算法的要求(难度系数5~8)分为以下六大核心模块:
1、复杂度分析掌握更高阶的 空间复杂度分析和 时间复杂度分析,这是评估算法是否会 TLE(超时)或 MLE(超内存)的唯一标准。
2、基础算法与排序
基础算法:分治算法(将大问题拆解为小问题,经典如归并排序的扩展)。
排序进阶:归并排序、快速排序、堆排序、桶排序、基数排序,以及少见的树形选择排序(锦标赛排序)。
3、字符串匹配彻底掌握 KMP算法,理解 next数组(前缀函数)的真谛,实现 的线性时间模式匹配。
的线性时间模式匹配。
4、搜索算法的极限打破暴力的枷锁:搜索的剪枝优化(可行性剪枝、最优性剪枝)、记忆化搜索(搜索与DP的结合)、启发式搜索(A*)、双向 BFS、迭代加深搜索(IDDFS)以及高级的搜索对象压缩存储(状态压缩)。
5、图论算法(重中之重)
最小生成树:Prim 和 Kruskal 算法,扩展至次小生成树。
最短路模型:Dijkstra、Bellman-Ford、SPFA 以及 Floyd-Warshall 算法,扩展至次短路模型。
连通性与环:有向无环图的拓扑排序、欧拉道路/回路、最近公共祖先(LCA)。
高级图论:二分图的构造与判定、强连通分量(Tarjan缩点)、割点与割边(桥)。
6、动态规划(DP的飞跃)从入门级的线性 DP 迈向更高的维度:树型动态规划(在树形结构上状态转移)、状态压缩动态规划(利用位运算表示集合状态),以及 动态规划的常用优化(如单调队列优化、斜率优化等)。
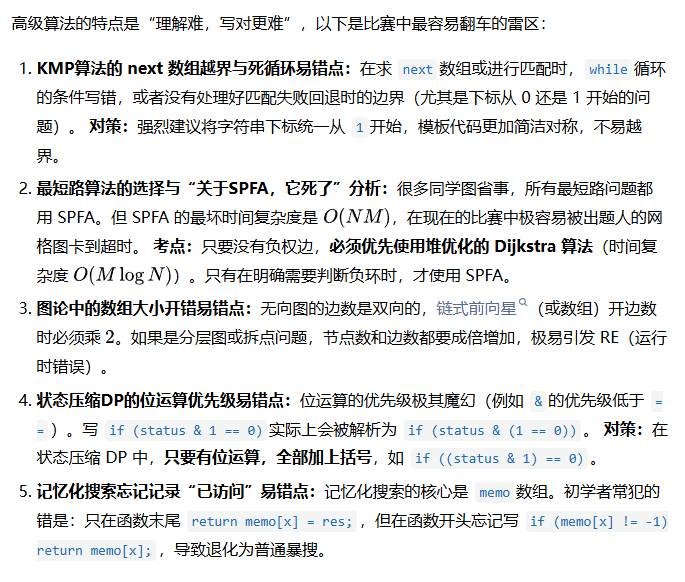
二、 常见考点与易错点分析
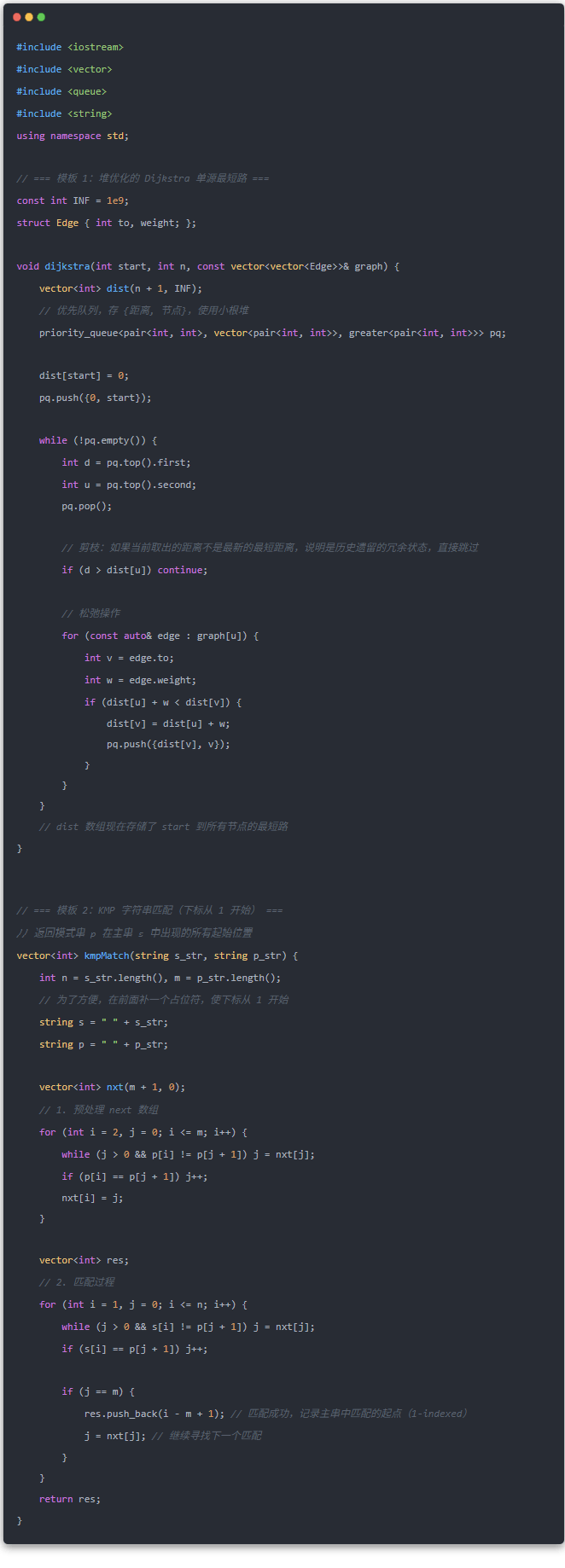
三、 C++ 示例代码:堆优化Dijkstra与KMP算法
这两个算法是提高级中最基础、也是应用最广的利器。
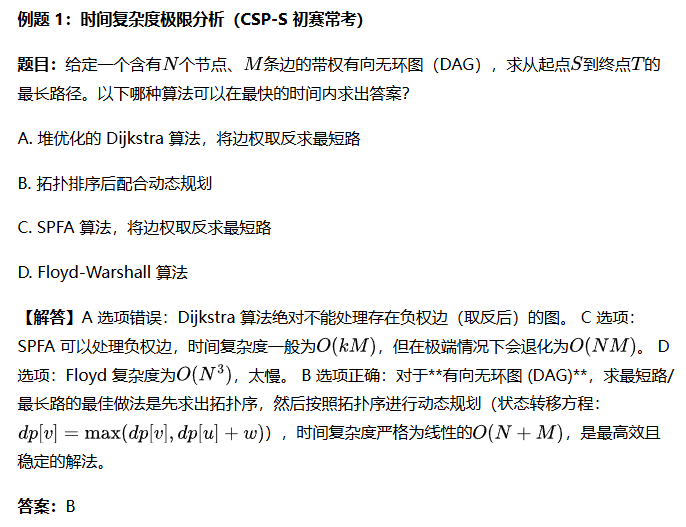
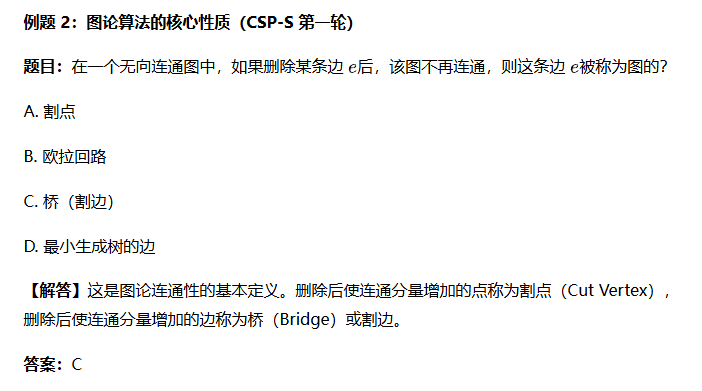
四、 典型真题解析
五、 结构化梳理:思维导图
推荐阅读: